SLAM?
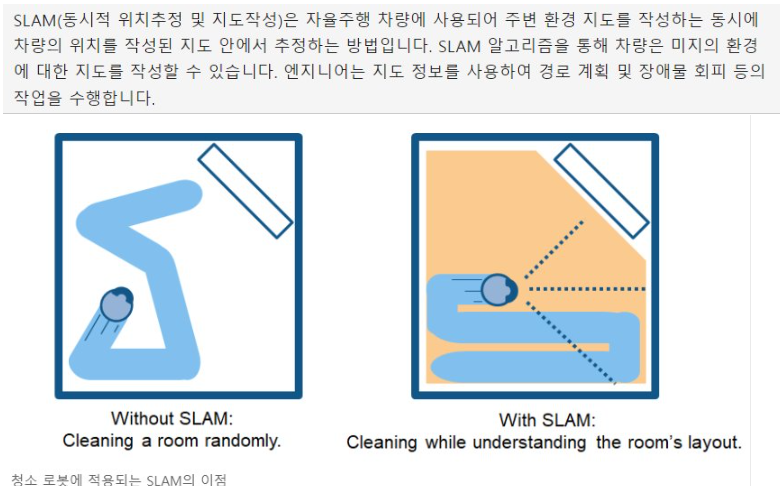
쉽게말해 SLAM을 이용하면 내가 지도상의 어느 위치에 어디를 바라보고 있는지를 알 수 있는 방식이다.
갈 수 있는 곳과 없는곳을 인지하고 장애물의 위치를 조기인지해 안정적인 환경을 만드는데 큰 역할을 한다.
SLAM에 관한건 여기까지만 이야기하고 이제 SLAM을 위해선 정확한 지도가 필요하다.
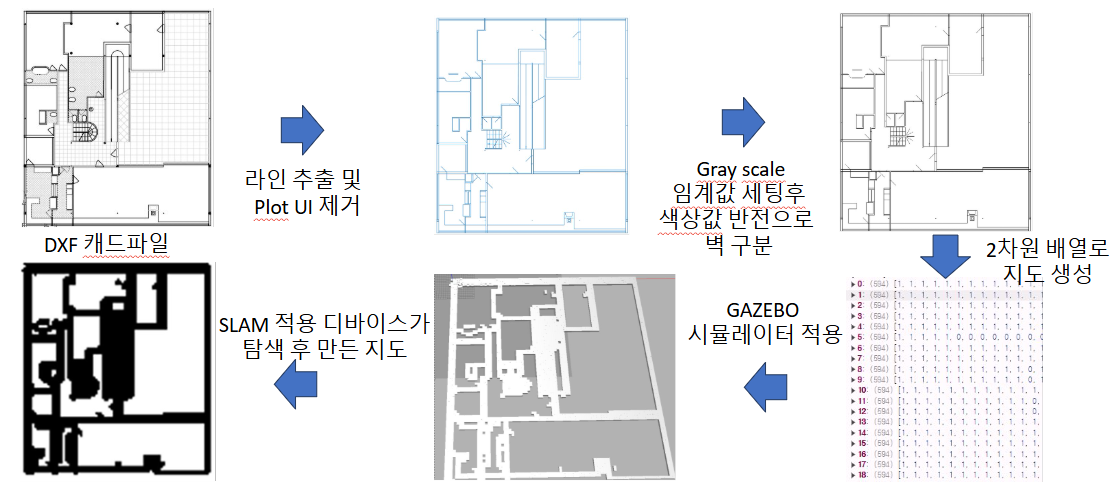
지도 추출
우린 지금까지 가상의 환경(GAZEBO)에서 진행했지만 이제 ROS에서 실제로 인식하는 맵 파일은 yaml파일과 pgm 파일의 조합이다.
yaml 파일에는 pgm파일에 대한 정보가 들어있다.
원점의 좌표, 픽셀당 실제 거리, 그레이스케일 임계값 등을 포함하고 있다.
GAZEBO에서 값을 추출하는 패키지는 많이 돌아다닌다.
아래 패키지를 참고했다.
ROS2 GAZEBO WORLD GENERATOR 2D/3D
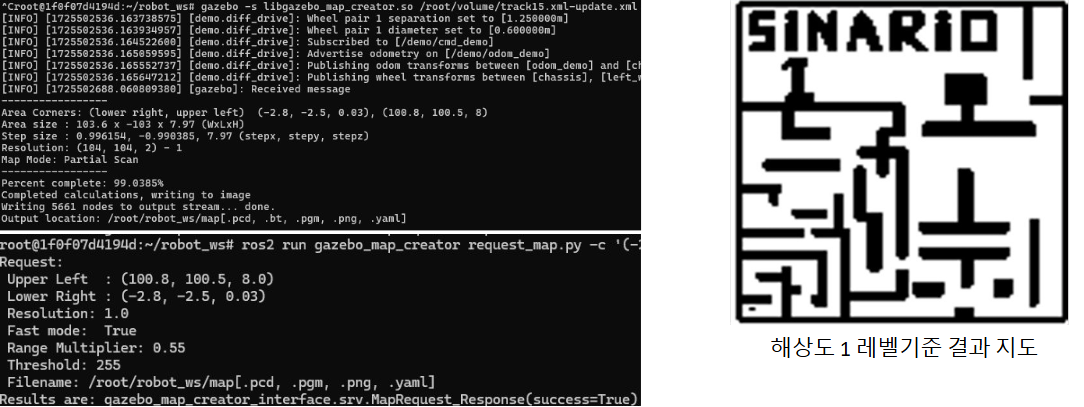
이제 한 번에 프론트에서 연계해 실제 ROS에서 운영되는 지도 생성까지 가능하다.

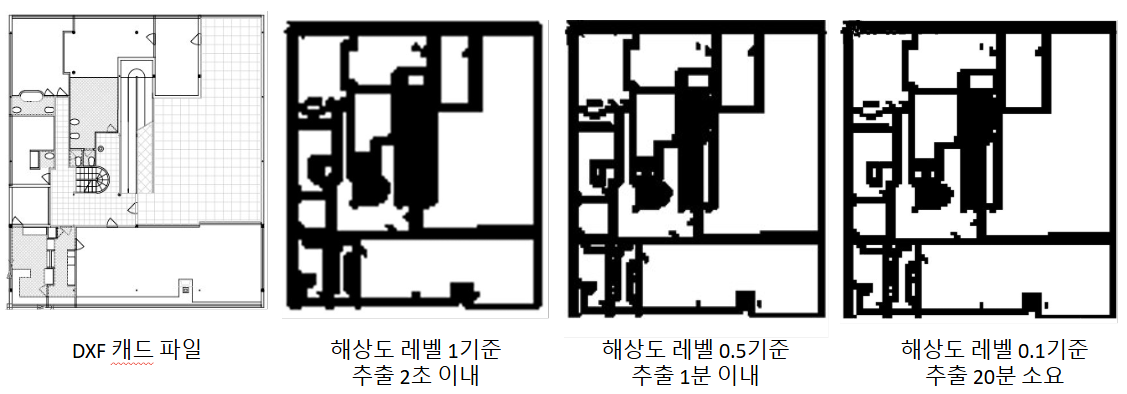
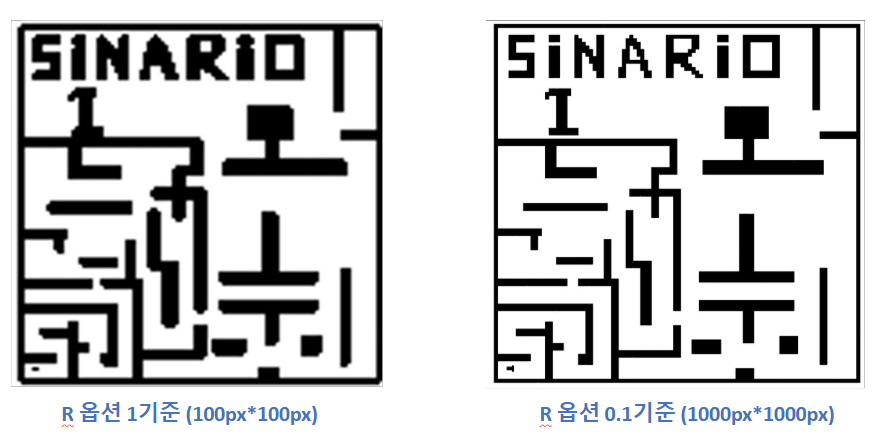
해상도 조절을 통해 시간을 투자하면 좀 더 높은 퀄리티의 지도를 생성 할 수 있다.
캐드파일역시 가져와서 얼추 추출은 가능해졌다.