로봇의 또하나의 눈(2)
특정 조건으로 인해 정밀하게 라인을 따라 AGV 처럼 움직여야하는 케이스로 인해
카메라 센서를 이용해 라인 트레이싱을 시도해보았다.
마그네틱 센서를 이용하면 상황에따라 더 정밀하게 가능하겠지만
우선 부착된 카메라센서를 이용해보기로했다.
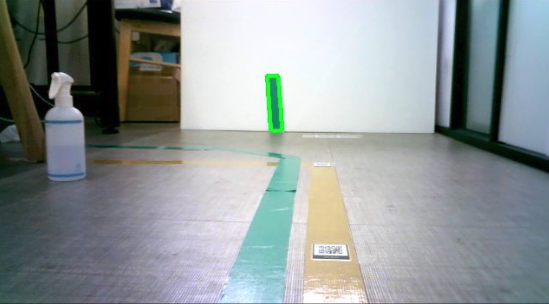
비교적 사용 빈도가 낮은 초록색 테이프를 구매후
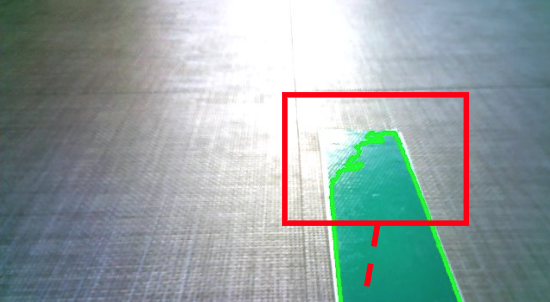
openCV를 이용해 이미지를 실시간 캡쳐 -> 색상 임계값을 초록색 계열로 지정후 테두리 생성
이 영역이 화면상 가운데 있다면 전진, 좌측이나 우측에 있다면 각속도도 함께 주어 해당 방향으로 돌도록 바퀴를 구동시켰다.
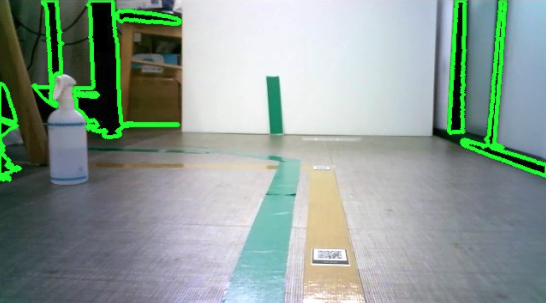
한계
실외에선 당연히 힘들겠지만 실내에서도 조도에따라 밝아진 부분은 감지가 불가능하다.

이처럼 파란색으로 비교적 사용 빈도가 낮은 색상을 이용하면 일부 개선되겠지만 크게 의미있진 않을 듯 하다.
임계값으로 검정색 계열을 잡으면 어두운 부분까지 잡히는 문제가 발생한다.
Vision카메라를 이용해 물체를 인식하지 않는 이상 카메라 센서는 다른 센서와 퓨전해서 사용해야겠다.