로봇의 또하나의 눈(3)
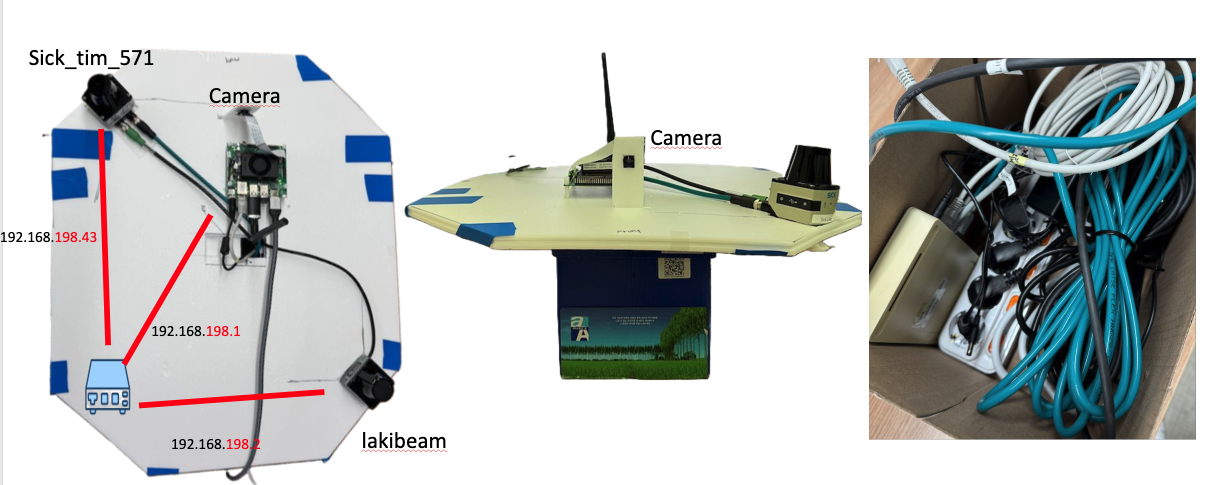
라이다가 하나 추가되어 라이다를 대각선으로 배치했다.
처음엔 앞뒤로 배치를 생각했지만 대각선으로 배치한 이유는 아래 그림과 같다.
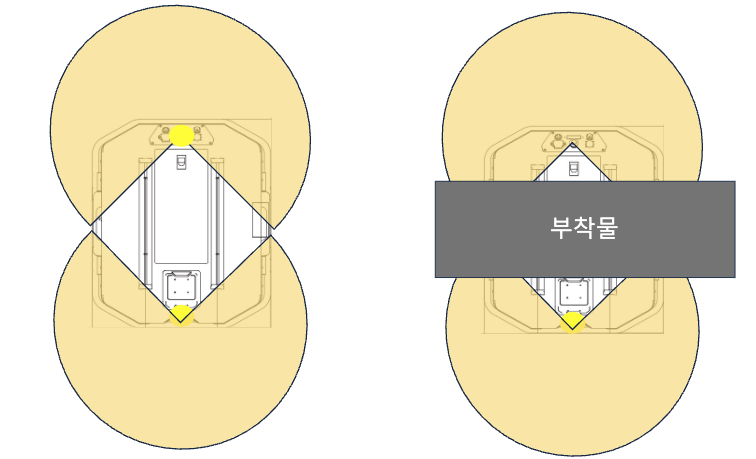
앞 뒤로 배치시 라이다 탐지 높이의 내부 통로를 비워야하고 중간에 부착물이 있는 경우 음영 구역이 생긴다.
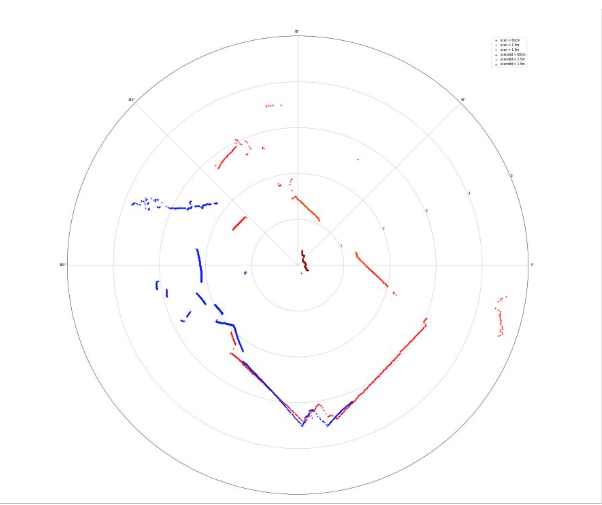
각각 센서별로 수집된 포인트들을 시각화하면 아래처럼 rviz에서 시각화가 가능하다.
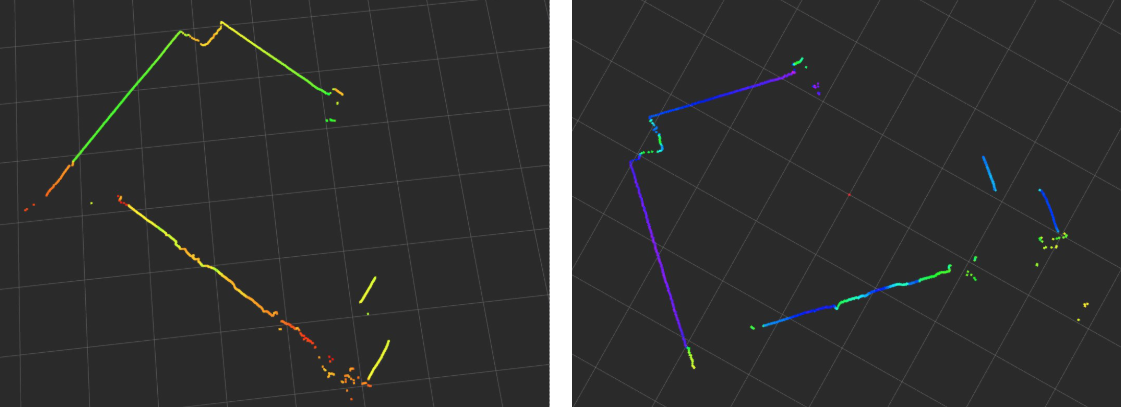
라이다의 스펙이 270도인걸 고려하면 얼추 잘 측정된다는걸 알 수 있다.
이제 센서 두개를 합쳐 하나의 그림으로 나타내야한다. 센서퓨전이라고 하겠다.
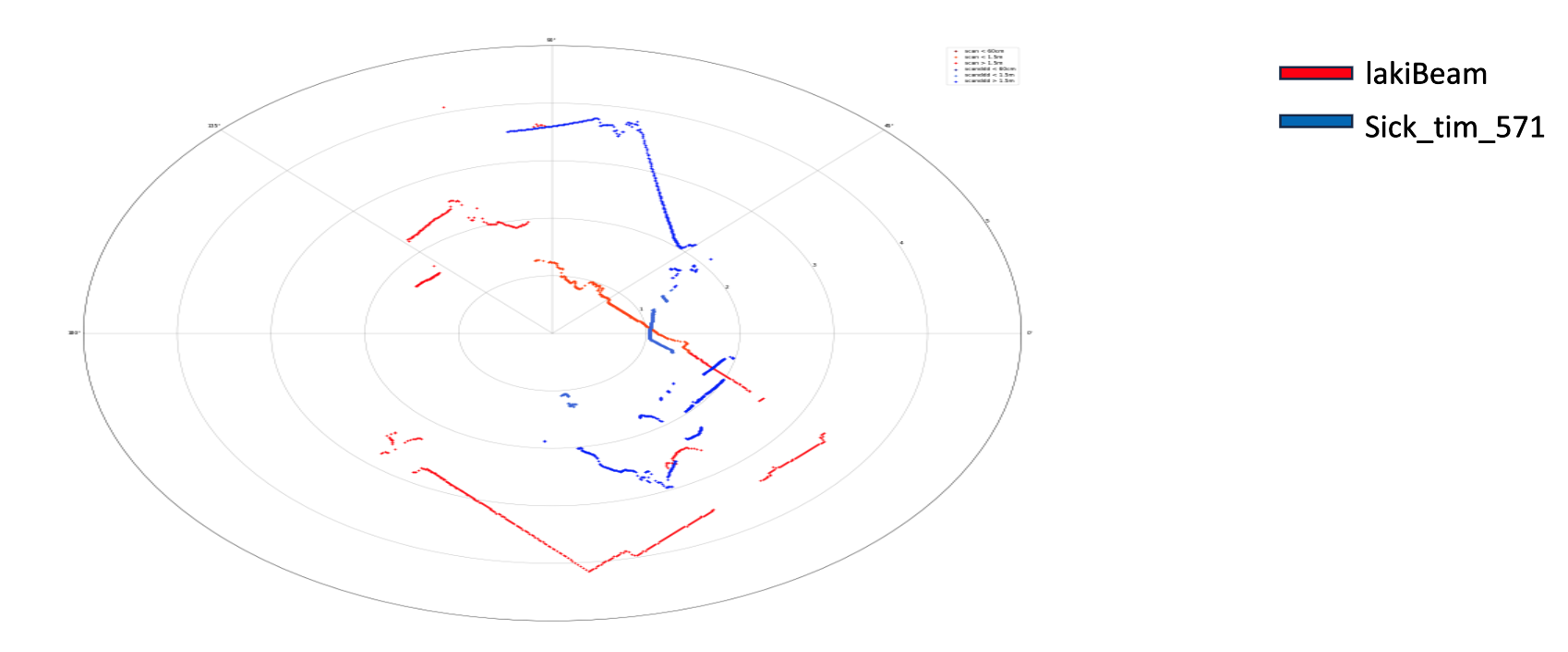
라이다 부착 위치와 방향이 다르다보니 offset과 rotation 과정이 필요하다.
두 개의 라이다를 사선으로 배치해서 중심점의 거리를 구한뒤 offset을 적용해주니 얼추 원하는 그림이 나왔다.
이제 1채널 한정이지만 360도 탐지가 가능하게 되었다.
처음겪었던 난관
방구석에서 편하게 키보드만 뚱땅거리면서 USB로 딸깍만 했는데 센서를 받고나니 날선만 들어있었다.
데이터도 LAN으로 들어오는 특이한 구조였는데 매우 당황스러웠다. (그냥 인터넷용 아니었냐고..)
두 개의 라이다도 다른 회사 제품이라 두 번 일해야했다.
어찌어찌 정격 전압에 맞춰 젯슨 어댑터를 가져와 잘라주고 합선시켜
12V로 맞춰주고 메뉴얼에 나온대로 아이피 세팅 과정을 진행하니 라이다 데이터가 수신되어 신기했다.
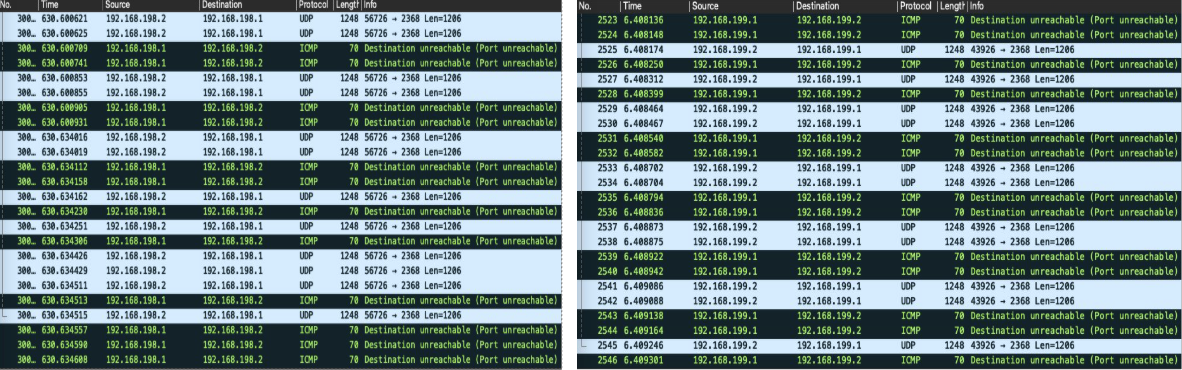
최종적인 내부 네트워크 구성은 아래와 같다.
또 라이다 자체의 아이피를 까먹어서 와이어샤크를 통해 노가다로 찾은건 덤.